3D-scanning the Burden of Dreams
Background
Ever since I started the crags3d-project back in the end of 2024, I’ve thought about scanning the Burden of Dreams. For those who are not too much into climbing, the boulder long held the world’s hardest outdoor boulder climb. It was first ascended by Nalle Hukkataival in 2016, who graded it 7A (V17) as the first boulder in the world of this grade. Later, Aidan Roberts made a 3d-scan of the holds to create a replica, on which many climbers have trained. The boulder saw the second ascent in 2023 by Will Bosi.
I live in Helsinki, Finland, which is not too far from the boulder, which is located in Loviisa. I have also been climbing a lot in the area, as the area holds a few really cool easier lines as well. So the scanning trip was not too long of a distance for me, with some 80 kilometers each direction. However the first trip to scan this boulder was unsuccessful, as first there were climbers on the route, and later in the evening the sky had cleared to show some sunlight - leading to unideal conditions. For photogrammetry, the best results are achieved in lighting conditions with as uniform diffuse lighting as possible, to avoid any shadows and reflections ending up in the textures.
Scanning
I used a Sony α900 DSLR and a DJI Phantom 4 Advanced drone to shoot the photos. I shot the photos in RAW-format, to enhance possibilities to correct the brightness levels, although I rarely edit the default settings. The day I scanned was perfect with regards to lighting conditions: The sky was covered with fairly thick clouds, leading to minimal direct lighting, while the diffuse lighting was still strong enough for the cameras.
DSLR
Overview
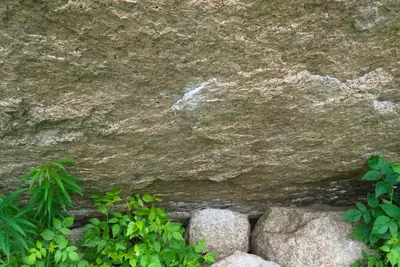
I usually start the photography with the DSLR: First I take a few far away photos while approaching the object.


After this, I circle the object from medium distance. I aim at a high overlap between images to guarantee success in the image alignment while reconstructing. Practically, I always shoot multiple photos from each location, with different angles both vertically and horizontally.



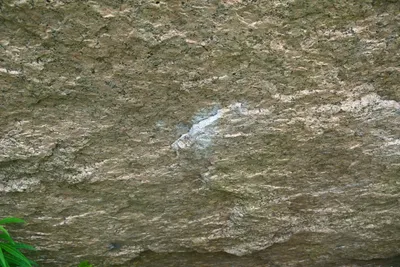
I continue the same approach from closer distance.



Finally, when there are specific sections of interest, I take multiple really close-by shots of these sections from different angles and different zoom levels to aid the alignment process. In this case, these are the holds used when climbing the route.
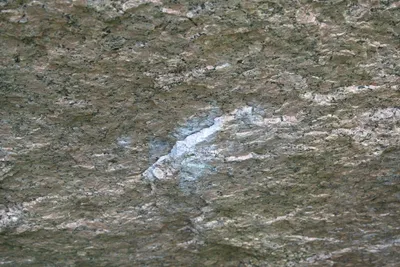
Altogether, I shot 614 images of the boulder with the DSLR.
Drone
With the drone I mainly capture general images showing the whole environment. There are some closer by photos of the top of the boulder, but the idea is more to scan the environment in less detail - I attempt to capture all the relevant holds and the top with the DSLR due to image quality. With the drone, I shot 724 images altogether.



Camera alignments
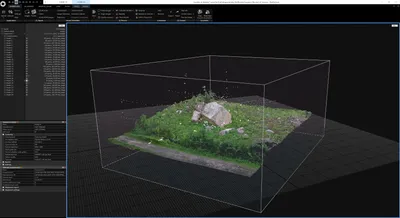
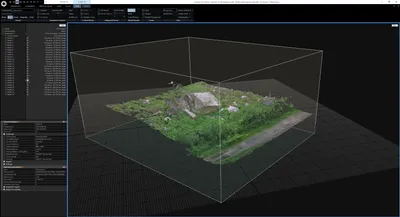
The images below show the resulting camera alignments in the 3D-scene.
Recreation process
I use RealityScan software for recreating the scene. I mostly recreate with default settings, although sometimes I need to increase the sensitivity and/or feature count during the image alignment process. For the Burden of Dreams, I run the recreation after image alignment twice:
- The whole environment in default quality, exported with 10 M triangles
- The boulder in high quality, exported with 25 M triangles
After recreating the scene, and exporting both the environment and the boulder itself, I merged these into one scene by removing overlaps, and split both meshes into spatially aware parts, reprojected the textures and created levels of details. This step is done by our own preprocessing pipeline written in Rust, which I may cover in a future blog-post.
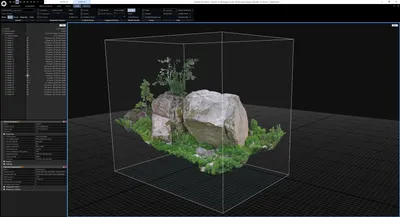
Result
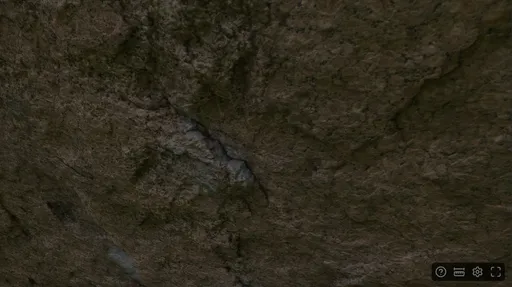
The result is visible above, feel free to try it out yourself. If you wish, you may embed this on your own pages inserting the html below.
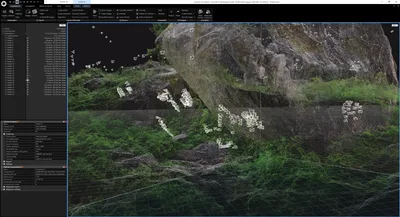
<iframe src="https://sangine.sanox.fi/scene/embed/b66f7663-b728-42f1-994e-2be9a30aebe1/" allow="fullscreen"></iframe>The image below shows a hold rendered using Sangine, with Ultra-quality. The model is also available with routes included on Burden of Dreams 3D topo